|
Chengkai Wu (吴程锴) I am currently pursuing a Ph.D. at The Hong Kong University of Science and Technology (Guangzhou), under the supervision of Prof. Boyu Zhou and Prof. Jun Ma since February 2025. Prior to this, I completed my Master's degree in Automation at Harbin Institute of Technology, Shenzhen (2022-2024) under the advisement of Jie Mei. I also received my B.Eng. in Electronic Information Engineering from Xidian University in 2022. If you are interested in research opportunities or collaborations, feel free to reach out at chengkaiwuu@gmail.com. |
|
News
|
PublicationsI'm interested in motion planning, and mobile manipulation. Most of my research focuses on enabling mobile robots to move intelligently. Representative papers are highlighted. * indicates equal contribution |
|
In Submission
A unified framework that synergizes efficiency and reliability for continuous mobile manipulation. |
|
2025 IEEE Robotics and Automation Letters (RAL 2025)
A zero-shot object navigation framework that is both more efficient and reliable. |
|
2025 Robotics: Science and Systems (RSS 2025)
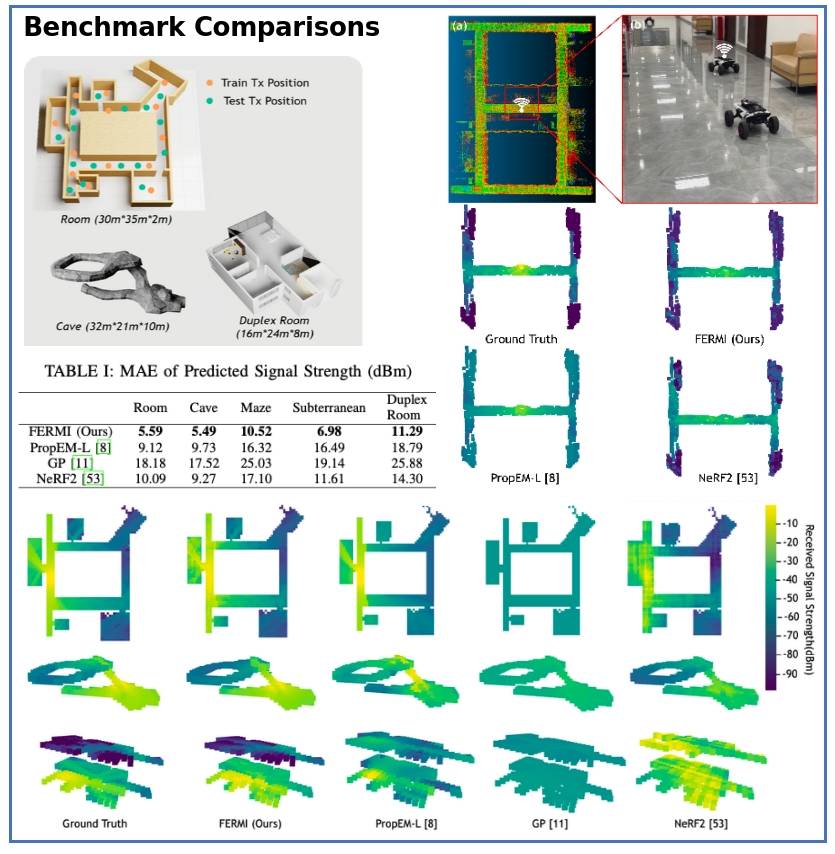
A flexible radio mapping framework. |
|
2024 IEEE International Conference on Robotics and Automation (ICRA 2024)
A real-time motion planning method for safe, agile, and feasible mobile manipulation. |
Projects |

|
Third Place
A perception, planning and control framework for autonomous drone racing using stereo camera. |

|
Second Place
A perception, planning and control framework for autonomous drone racing using stereo camera. |
Teaching |
|
UFUG1103 - Calculus II (Spring 2026)
Teaching Assistant
This course is the second in a year-long introductory sequence in one-variable calculus for first-year undergraduates. Topics include integrals, numerical methods, applications, and infinite series. |

|
Teaching Assistant
The Red Bird Challenge Camp (RBCC) is an innovative teaching through practice activity, aims to cultivate the comprehensive ability of college students. |
Reviewer |
|
Conference Reviewer: ICRA Journal Reviewer: T-ASE, RAL |
Template credits: Jon Barron |